Bug Navigation
Instructions
This is the final checkpoint for the bug navigation project. In this checkpoint you will implement a function for checking whether the straight line path to a goal pose is obstructed. You will then use this function as a transition condition between the two states in the bug navigation state machine. The first state will drive in a straight line to the goal, like you implemented in Robot Hits the Spot. The second state will wall follow around an obstruction, like you implemented in Wall Follower. Complete the following:
- Implement
isGoalAngleObstructed()inmbot_lib/mbot_lib/behaviors.cppaccording to the header filembot_lib/mbot_lib/behaviors.h. - Implement bug navigation in
p2_bug_navigation/3_bug_navigation.cppso that the robot performs the behavior specified below.
For isGoalAngleObstructed(), you’ll want to make use of the findMinNonzeroDistInSlice() utility function which is provided for you in mbot_lib/mbot_lib/utils.h. This function can be best understood using the diagram below.
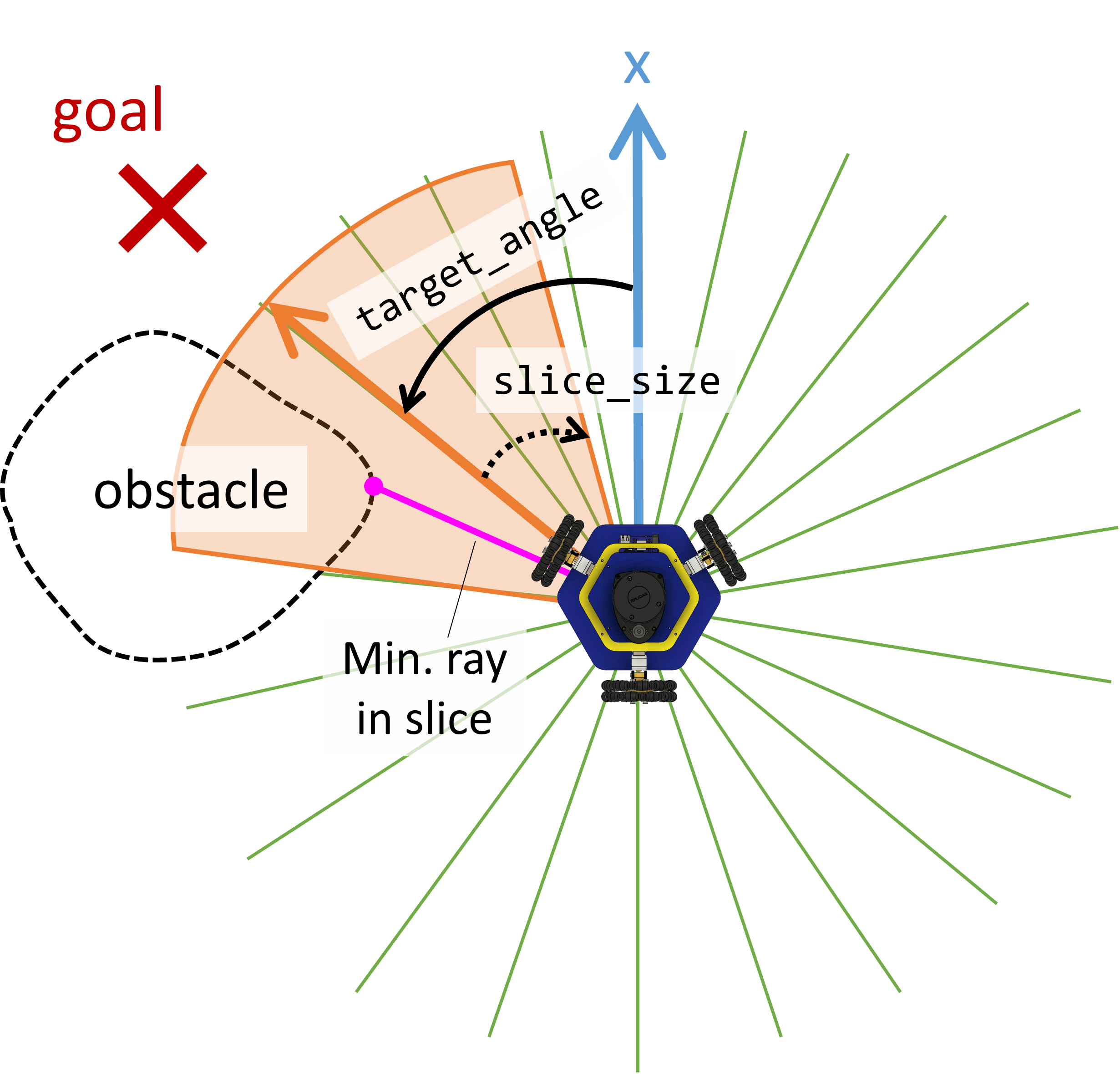
Using it in isGoalAngleObstructed() should make checking for obstacles near the robot in the direction of the goal pose much easier. For implementing the state machine you will want to make use of all the functions in mbot_lib/mbot_lib/behaviors.cpp.
Expected Behavior
The terminal should ask for the user to input values for an (x, y, theta) goal pose. The robot should then drive in a straight line to the goal pose. When it comes within a small distance (under 1 meter) of an obstacle it should begin wall following around the obstacle. When the goal pose can again be driven to in a straight line, the robot should resume driving straight. Finally the terminal should output the final odometry position of the robot. The final odometry pose should be very close (within 3 centimeters and 0.15 radians) to the input goal pose. A demonstration of this behavior is shown in the video below.
In your demonstration, be sure to show the input goal pose and final pose.
Testing
There are no unit tests for this checkpoint.
The robot behavior can be tested by running the bug_navigation.