Planning in Michigan (In Code)
Instructions
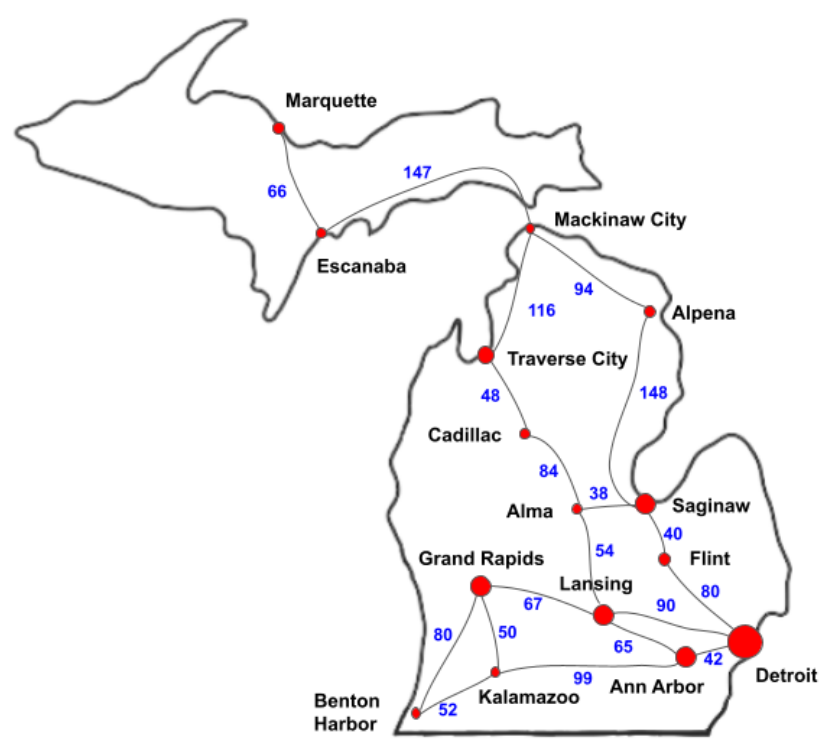
In this checkpoint you will find a path using the Breadth First Search algorithm on a map. You will plan in one of these maps, which is customized based on where you are taking the course:

Complete the following:
- Design a way to store node data needed in BFS. Add members to the
Graphstruct to store this data. - Complete function
initGraph(). It should create space to store data for each node in the graph and initialize any data you might need. - Complete function
getParent(). It should return the index of the parent node. If the node has no parent, it should return -1. - Complete function
bfs(start, goal, g). It should perform Breadth First Search to find a path from node indexstarttogoalwithin graphg.
Code Overview
All of the code for this activity is in src/1_planning_in_michigan/. The purpose of this codebase is to represent a graph as a struct in code and then implement basic graph search algorithms over that graph. The definition of the Graph is given in planning.h along with a few definitions and several declarations for functions to manipulate the graph. The functions that are declared in planning.h are implemented in planning.cpp. You will work in planning.h and planning.cpp according to the items above, which are marked as tasks.
The graph you will plan over is loaded from the file data/planning_in_michigan/mi_graph.txt. This graph stores the node names and connectivity of the graph pictured above.
Expected Behavior
The expected behavior of the code is described in the header file planning.h. By taking a read through all of the comments you should be able to get a sense of how the code fits together.
Testing
Some of the functions can be tested by running ctest --output-on-failure in the /build directory.
To run breadth first search manually, you can run the executable ./plan_in_michigan in the /build directory. This runs the main() function in src/1_planning_in_michigan/main.cpp which is designed to help you see the output of your algorithm.